Единичные векторы. Орты
Единичный вектор - это вектор , абсолютная величина (модуль) которого равен единице. Для обозначения единичного вектора мы будем использовать нижний индекс е. Так, если задан вектор а , то его единичным вектором будет вектор а е. Этот единичный вектор направлен туда же, куда направлен и сам вектор а , и его модуль равен единице, то есть а е = 1.
Очевидно, а = а·а е (а - модуль вектора а) . Это следует из правила, по которому выполняется операция умножения скаляра на вектор .
Единичные векторы часто связывают с координатными осями системы координат (в частности, с осями декартовой системы координат). Направления этих векторов совпадают с направлениями соответствующих осей, а их начала часто совмещают с началом системы координат.
Напомню, что декартовой системой координат в пространстве традиционно называется тройка взаимно перпендикулярных осей, пересекающихся в точке, которая называется началом координат. Координатные оси обычно обозначают буквами X , Y , Z и называют соответственно осью абсцисс, осью ординат и осью аппликат. Сам Декарт пользовался только одной осью, на которой откладывались абсциссы. Заслуга использования системы осей принадлежит его ученикам. Поэтому фраза декартова система координат исторически ошибочна. Лучше говорить прямоугольная система координат или ортогональная система координат . Тем не менее, изменять традиции мы не станем и в дальнейшем будем считать, что декартова и прямоугольная (ортогональная) системы координат - это одно и то же.
Единичный вектор
, направленный вдоль оси Х, обозначается i
, единичный вектор
, направленный вдоль оси Y , обозначается j
, а единичный вектор
, направленный вдоль оси Z, обозначается k
. Векторы i
, j
, k
называются ортами
(рис. 12, слева), они имеют единичные модули, то есть
i = 1, j = 1, k = 1.
Оси и орты прямоугольной системы координат в некоторых случаях имеют другие названия и обозначения. Так, ось абсцисс X может называться касательной осью, а ее орт обозначается τ (греческая строчная буква тау), ось ординат - осью нормали, ее орт обозначается n , ось аппликат - осью бинормали, ее орт обозначается b . Зачем менять названия, если суть остается той же?
Дело в том, что, например, в механике при изучении движения тел прямоугольная система координат используется очень часто. Так вот, если сама система координат неподвижна, а изменение координат движущегося объекта отслеживается в этой неподвижной системе, то обычно оси обозначают X, Y, Z, а их орты соответственно i , j , k .
Но нередко, когда объект движется по какой-то криволинейной траектории (например, по окружности) бывает удобнее рассматривать механические процессы в системе координат, движущейся с этим объектом. Именно для такой движущейся системы координат и используются другие названия осей и их ортов. Просто так принято. В этом случае ось X направляют по касательной к траектории в той ее точке, в которой в данный момент этот объект находится. И тогда эту ось называют уже не осью X, а касательной осью, а ее орт обозначают уже не i , а τ . Ось Y направляют по радиусу кривизны траектории (в случае движения по окружности - к центру окружности). А поскольку радиус перпендикулярен касательной, то ось называют осью нормали (перпендикуляр и нормаль - это одно и то же). Орт этой оси обозначают уже не j , а n . Третья ось (бывшая Z) перпендикулярна двум предыдущим. Это - бинормаль с ортом b (рис. 12, справа). Кстати, в этом случае такую прямоугольную систему координат часто называют «естественной» или натуральной.
Наконец-то у меня добрались руки до обширной и долгожданной темы аналитической геометрии . Сначала немного о данном разделе высшей математики…. Наверняка вам сейчас вспомнился курс школьной геометрии с многочисленными теоремами, их доказательствами, чертежами и т.д. Что скрывать, нелюбимый и часто малопонятный предмет для значительной доли учеников. Аналитическая геометрия, как ни странно, может показаться более интересной и доступной. Что означает прилагательное «аналитическая»? На ум сразу приходят два штампованных математических оборота: «графический метод решения» и «аналитический метод решения». Графический метод , понятно, связан с построением графиков, чертежей. Аналитический же метод предполагает решение задач преимущественно посредством алгебраических действий. В этой связи алгоритм решений практически всех задач аналитической геометрии прост и прозрачен, зачастую достаточно аккуратно применить нужные формулы – и ответ готов! Нет, конечно, совсем без чертежей тут не обойдется, к тому же для лучшего понимания материала я постараюсь приводить их сверх необходимости.
Открываемый курс уроков по геометрии не претендует на теоретическую полноту, он ориентирован на решение практических задач. Я включу в свои лекции только то, что с моей точки зрения, является важным в практическом плане. Если вам необходима более полная справка по какому-либо подразделу, рекомендую следующую вполне доступную литературу:
1) Вещь, с которой, без шуток, знакомо несколько поколений: Школьный учебник по геометрии , авторы – Л.С. Атанасян и Компания . Сия вешалка школьной раздевалки уже выдержала 20-ть (!) переизданий, что, конечно, не является пределом.
2) Геометрия в 2 томах . Авторы Л.С. Атанасян, Базылев В.Т . Это литература для высшей школы, вам потребуется первый том . Из моего поля зрения могут выпадать редко встречающиеся задачи, и учебное пособие окажет неоценимую помощь.
Обе книги можно бесплатно закачать в Интернете. Кроме того, можете использовать мой архив с готовыми решениями, который можно найти на странице Скачать примеры по высшей математике .
Из инструментальных средств предлагаю опять же собственную разработку – программный комплекс по аналитической геометрии, который значительно упростит жизнь и сэкономит массу времени.
Предполагается, что читатель знаком с базовыми геометрическими понятиями и фигурами: точка, прямая, плоскость, треугольник, параллелограмм, параллелепипед, куб и т.д. Желательно помнить некоторые теоремы, хотя бы теорему Пифагора, привет второгодникам)
А сейчас мы последовательно рассмотрим: понятие вектора, действия с векторами, координаты вектора. Далее рекомендую прочитать важнейшую статью Скалярное произведение векторов , а также и Векторное и смешанное произведение векторов . Не лишней будет и локальная задача – Деление отрезка в данном отношении . На основе вышеуказанной информации можно освоить уравнение прямой на плоскости с простейшими примерами решений , что позволит научиться решать задачи по геометрии . Также полезны следующие статьи: Уравнение плоскости в пространстве , Уравнения прямой в пространстве , Основные задачи на прямую и плоскость , другие разделы аналитической геометрии. Естественно, попутно будут рассматривать типовые задания.
Понятие вектора. Свободный вектор
Сначала повторим школьное определение вектора. Вектором называется направленный отрезок, для которого указано его начало и конец:
В данном случае началом отрезка является точка , концом отрезка – точка . Сам вектор обозначен через . Направление имеет существенное значение, если переставить стрелку в другой конец отрезка, то получится вектор , и это уже совершенно другой вектор . Понятие вектора удобно отождествлять с движением физического тела: согласитесь, зайти в двери института или выйти из дверей института – это совершенно разные вещи.
Отдельные точки плоскости, пространства удобно считать так называемым нулевым вектором . У такого вектора конец и начало совпадают.
!!! Примечание: Здесь и далее можете считать, что векторы лежат в одной плоскости или можете считать, что они расположены в пространстве – суть излагаемого материала справедлива и для плоскости и для пространства.
Обозначения: Многие сразу обратили внимание на палочку без стрелочки в обозначении и сказали, там же вверху еще стрелку ставят! Верно, можно записать со стрелкой: , но допустима и запись , которую я буду использовать в дальнейшем . Почему? Видимо, такая привычка сложилась из практических соображений, слишком разнокалиберными и мохнатыми получались мои стрелки в школе и ВУЗе. В учебной литературе иногда вообще не заморачиваются клинописью, а выделяют буквы жирным шрифтом: , подразумевая тем самым, что это вектор.
То была стилистика, а сейчас о способах записи векторов:
1) Векторы можно записать двумя большими латинскими буквами:![]() и так далее. При этом первая буква обязательно
обозначает точку-начало вектора, а вторая буква – точку-конец вектора.
и так далее. При этом первая буква обязательно
обозначает точку-начало вектора, а вторая буква – точку-конец вектора.
2) Векторы также записывают маленькими латинскими буквами:
В частности, наш вектор можно для краткости переобозначить маленькой латинской буквой .
Длиной или модулем ненулевого вектора называется длина отрезка . Длина нулевого вектора равна нулю. Логично.
Длина вектора обозначается знаком модуля: ,
Как находить длину вектора мы узнаем (или повторим, для кого как) чуть позже.
То были элементарные сведения о векторе, знакомые всем школьникам. В аналитической же геометрии рассматривается так называемый свободный вектор .
Если совсем просто – вектор можно отложить от любой точки
:
Такие векторы мы привыкли называть равными (определение равных векторов будет дано ниже), но чисто с математической точки зрения это ОДИН И ТОТ ЖЕ ВЕКТОР или свободный вектор . Почему свободный? Потому что в ходе решения задач вы можете «пристроить» тот или иной «школьный» вектор в ЛЮБУЮ, нужную вам точку плоскости или пространства. Это очень крутое свойство! Представьте направленный отрезок произвольной длины и направления – его можно «клонировать» бесконечное количество раз и в любой точке пространства, по сути, он существует ВЕЗДЕ. Есть такая студенческая присказка: Каждому лектору в ж**у по вектору. Ведь не просто остроумная рифма, всё почти корректно – направленный отрезок можно пристроить и туда. Но не спешите радоваться, чаще страдают сами студенты =)
Итак, свободный вектор – это множество одинаковых направленных отрезков. Школьное определение вектора, данное в начале параграфа: «Вектором называется направленный отрезок…», подразумевает конкретный направленный отрезок, взятый из данного множества, который привязан к определённой точке плоскости или пространства.
Следует отметить, что с точки зрения физики понятие свободного вектора в общем случае некорректно, и точка приложения имеет значение. Действительно, прямой удар одинаковой силы по носу или по лбу хватит развивать мой дурацкий пример влёчет разные последствия. Впрочем, несвободные векторы встречаются и в курсе вышмата (не ходите туда:)).
Действия с векторами. Коллинеарность векторов
В школьном курсе геометрии рассматривается ряд действий и правил с векторами: сложение по правилу треугольника, сложение по правилу параллелограмма, правило разности векторов, умножения вектора на число, скалярное произведение векторов и др. Для затравки повторим два правила, которые особенно актуальны для решения задач аналитической геометрии.
Правило сложения векторов по правилу треугольников
Рассмотрим два произвольных ненулевых вектора и :
Требуется найти сумму данных векторов. В силу того, что все векторы считаются свободными, отложим вектор от конца
вектора :
Суммой векторов и является вектор . Для лучшего понимания правила в него целесообразно вложить физический смысл: пусть некоторое тело совершило путь по вектору , а затем по вектору . Тогда сумма векторов представляет собой вектор результирующего пути с началом в точке отправления и концом в точке прибытия. Аналогичное правило формулируется для суммы любого количества векторов. Как говорится, тело может пройти свой путь сильно поддатым по зигзагу, а может и на автопилоте – по результирующему вектору суммы.
Кстати, если вектор отложить от начала вектора , то получится эквивалентное правило параллелограмма сложения векторов.
Сначала о коллинеарности векторов. Два вектора называются коллинеарными , если они лежат на одной прямой или на параллельных прямых. Грубо говоря, речь идёт о параллельных векторах. Но применительно к ним всегда используют прилагательное «коллинеарные».
Представьте два коллинеарных вектора. Если стрелки данных векторов направлены в одинаковом направлении, то такие векторы называются сонаправленными . Если стрелки смотрят в разные стороны, то векторы будут противоположно направлены .
Обозначения: коллинеарность векторов записывают привычным значком параллельности: , при этом возможна детализация: (векторы сонаправлены) или (векторы направлены противоположно).
Произведением ненулевого вектора на число является такой вектор , длина которого равна , причём векторы и сонаправлены при и противоположно направлены при .
Правило умножения вектора на число легче понять с помощью рисунка:
Разбираемся более детально:
1) Направление. Если множитель отрицательный, то вектор меняет направление на противоположное.
2) Длина. Если множитель заключен в пределах или , то длина вектора уменьшается . Так, длина вектора в два раза меньше длины вектора . Если множитель по модулю больше единицы, то длина вектора увеличивается в раз.
3) Обратите внимание, что все векторы коллинеарны , при этом один вектор выражен через другой, например, . Обратное тоже справедливо : если один вектор можно выразить через другой, то такие векторы обязательно коллинеарны. Таким образом: если мы умножаем вектор на число, то получится коллинеарный (по отношению к исходному) вектор .
4) Векторы сонаправлены. Векторы и также сонаправлены. Любой вектор первой группы противоположно направлен по отношению к любому вектору второй группы.
Какие векторы являются равными?
Два вектора равны, если они сонаправлены и имеют одинаковую длину . Заметьте, что сонаправленность подразумевает коллинеарность векторов. Определение будет неточным (избыточным), если сказать: «Два вектора равны, если они коллинеарны, сонаправлены и имеют одинаковую длину».
С точки зрения понятия свободного вектора, равные векторы – это один и тот же вектор, о чём уже шла речь в предыдущем параграфе.
Координаты вектора на плоскости и в пространстве
Первым пунктом рассмотрим векторы на плоскости. Изобразим декартову прямоугольную систему координат и от начала координат отложим единичные векторы и :

Векторы и ортогональны . Ортогональны = Перпендикулярны. Рекомендую потихоньку привыкать к терминам: вместо параллельности и перпендикулярности используем соответственно слова коллинеарность и ортогональность .
Обозначение: ортогональность векторов записывают привычным значком перпендикулярности, например: .
Рассматриваемые векторы называют координатными векторами или ортами . Данные векторы образуют базис на плоскости. Что такое базис, думаю, интуитивно многим понятно, более подробную информацию можно найти в статье Линейная (не) зависимость векторов. Базис векторов .Простыми словами, базис и начало координат задают всю систему – это своеобразный фундамент, на котором кипит полная и насыщенная геометрическая жизнь.
Иногда построенный базис называют ортонормированным базисом плоскости: «орто» – потому что координатные векторы ортогональны, прилагательное «нормированный» означает единичный, т.е. длины векторов базиса равны единице.
Обозначение: базис обычно записывают в круглых скобках, внутри которых в строгой последовательности перечисляются базисные векторы, например: . Координатные векторы нельзя переставлять местами.
Любой
вектор плоскости единственным образом
выражается в виде:![]() , где – числа
, которые называются координатами вектора
в данном базисе. А само выражение
, где – числа
, которые называются координатами вектора
в данном базисе. А само выражение ![]() называется разложением вектора
по базису
.
называется разложением вектора
по базису
.
Ужин подан:

Начнем с первой буквы алфавита: . По чертежу хорошо видно, что при разложении вектора по базису используются только что рассмотренные:
1) правило умножения вектора на число: и ;
2) сложение векторов по правилу треугольника: .
А теперь мысленно отложите вектор от любой другой точки плоскости. Совершенно очевидно, что его разложение будет «неотступно следовать за ним». Вот она, свобода вектора – вектор «всё носит при себе». Это свойство, разумеется, справедливо для любого вектора. Забавно, что сами базисные (свободные) векторы не обязательно откладывать от начала координат, один можно нарисовать, например, слева внизу, а другой – справа вверху, и от этого ничего не изменится! Правда, делать так не нужно, поскольку преподаватель тоже проявит оригинальность и нарисует вам «зачтено» в неожиданном месте.
Векторы , иллюстрируют в точности правило умножения вектора на число, вектор сонаправлен с базисным вектором , вектор направлен противоположно по отношению к базисному вектору . У данных векторов одна из координат равна нулю, дотошно можно записать так:
А базисные векторы, к слову, так: (по сути, они выражаются сами через себя).
И, наконец: , . Кстати, что такое вычитание векторов, и почему я не рассказал о правиле вычитания? Где-то в линейной алгебре, уже не помню где, я отмечал, что вычитание – это частный случай сложения. Так, разложения векторов «дэ» и «е» преспокойно записываются в виде суммы: , ![]() . Проследите по чертежу, как чётко в этих ситуациях работает старое доброе сложение векторов по правилу треугольника.
. Проследите по чертежу, как чётко в этих ситуациях работает старое доброе сложение векторов по правилу треугольника.
Рассмотренное разложение вида ![]() иногда называют разложением вектора в системе орт
(т.е. в системе единичных векторов). Но это не единственный способ записи вектора, распространён следующий вариант:
иногда называют разложением вектора в системе орт
(т.е. в системе единичных векторов). Но это не единственный способ записи вектора, распространён следующий вариант:
Или со знаком равенства:
Сами базисные векторы записываются так: и
То есть, в круглых скобках указываются координаты вектора. В практических задачах используются все три варианта записи.
Сомневался, говорить ли, но всё-таки скажу: координаты векторов переставлять нельзя . Строго на первом месте записываем координату, которая соответствует единичному вектору , строго на втором месте записываем координату, которая соответствует единичному вектору . Действительно, и – это ведь два разных вектора.
С координатами на плоскости разобрались. Теперь рассмотрим векторы в трехмерном пространстве, здесь практически всё так же! Только добавится ещё одна координата. Трехмерные чертежи выполнять тяжко, поэтому ограничусь одним вектором, который для простоты отложу от начала координат:
Любой
вектор трехмерного пространства можно единственным способом
разложить по ортонормированному базису : ![]() , где – координаты вектора (числа) в данном базисе.
, где – координаты вектора (числа) в данном базисе.
Пример с картинки: ![]() . Давайте посмотрим, как здесь работают правила действий с векторами. Во-первых, умножение вектора на число: (красная стрелка), (зеленая стрелка) и (малиновая стрелка). Во-вторых, перед вами пример сложения нескольких, в данном случае трёх, векторов: . Вектор суммы начинается в исходной точке отправления (начало вектора ) и утыкается в итоговую точку прибытия (конец вектора ).
. Давайте посмотрим, как здесь работают правила действий с векторами. Во-первых, умножение вектора на число: (красная стрелка), (зеленая стрелка) и (малиновая стрелка). Во-вторых, перед вами пример сложения нескольких, в данном случае трёх, векторов: . Вектор суммы начинается в исходной точке отправления (начало вектора ) и утыкается в итоговую точку прибытия (конец вектора ).
Все векторы трехмерного пространства, естественно, тоже свободны, попробуйте мысленно отложить вектор от любой другой точки, и вы поймёте, что его разложение «останется при нём».
Аналогично плоскому случаю, помимо записи ![]() широко используются версии со скобками: либо .
широко используются версии со скобками: либо .
Если в разложении отсутствует один (или два) координатных вектора, то вместо них ставятся нули. Примеры:
вектор (дотошно ![]() ) – запишем ;
) – запишем ;
вектор (дотошно ) – запишем ;
вектор (дотошно ![]() ) – запишем .
) – запишем .
Базисные векторы записываются следующим образом:
Вот, пожалуй, и все минимальные теоретические знания, необходимые для решения задач аналитической геометрии. Возможно многовато терминов и определений, поэтому чайникам рекомендую перечитать и осмыслить данную информацию ещё раз. Да и любому читателю будет полезно время от времени обращаться к базовому уроку для лучшего усвоения материала. Коллинеарность, ортогональность, ортонормированный базис, разложение вектора – эти и другие понятия будут часто использоваться в дальнейшем. Отмечу, что материалов сайта недостаточно для сдачи теоретического зачета, коллоквиума по геометрии, так как все теоремы (к тому же без доказательств) я аккуратно шифрую – в ущерб научному стилю изложения, но плюсом к вашему пониманию предмета. Для получения обстоятельной теоретической справки прошу следовать на поклон к профессору Атанасяну.
А мы переходим к практической части:
Простейшие задачи аналитической геометрии.
Действия с векторами в координатах
Задания, которые будут рассмотрены, крайне желательно научиться решать на полном автомате, а формулы запомнить наизусть , даже специально не запоминать, сами запомнятся =) Это весьма важно, поскольку на простейших элементарных примерах базируются другие задачи аналитической геометрии, и будет досадно тратить дополнительное время на поедание пешек. Не нужно застёгивать верхние пуговицы на рубашке, многие вещи знакомы вам со школы.
Изложение материала пойдет параллельным курсом – и для плоскости, и для пространства. По той причине, что все формулы… сами увидите.
Как найти вектор по двум точкам?
Если даны две точки плоскости и , то вектор имеет следующие координаты:![]()
Если даны две точки пространства и , то вектор имеет следующие координаты:
То есть, из координат конца вектора нужно вычесть соответствующие координаты начала вектора .
Задание: Для тех же точек запишите формулы нахождения координат вектора . Формулы в конце урока.
Пример 1
Даны две точки плоскости и . Найти координаты вектора
Решение:
по соответствующей формуле:
Как вариант, можно было использовать следующую запись:
Эстеты решат и так:
Лично я привык к первой версии записи.
Ответ:
По условию не требовалось строить чертежа (что характерно для задач аналитической геометрии), но в целях пояснения некоторых моментов чайникам, не поленюсь:
Обязательно нужно понимать различие между координатами точек и координатами векторов :
Координаты точек – это обычные координаты в прямоугольной системе координат. Откладывать точки на координатной плоскости, думаю, все умеют ещё с 5-6 класса. Каждая точка обладает строгим местом на плоскости, и перемещать их куда-либо нельзя.
Координаты же вектора – это его разложение по базису , в данном случае . Любой вектор является свободным, поэтому при желании или необходимости мы легко можем отложить его от какой-нибудь другой точки плоскости. Интересно, что для векторов можно вообще не строить оси, прямоугольную систему координат, нужен лишь базис, в данном случае ортонормированный базис плоскости .
Записи координат точек и координат векторов вроде бы схожи: , а смысл координат абсолютно разный , и вам следует хорошо понимать эту разницу. Данное отличие, разумеется, справедливо и для пространства.
Дамы и господа, набиваем руку:
Пример 2
а) Даны точки и . Найти векторы и .
б) Даны точки ![]() и . Найти векторы и .
и . Найти векторы и .
в) Даны точки и . Найти векторы и .
г) Даны точки . Найти векторы ![]() .
.
Пожалуй, достаточно. Это примеры для самостоятельного решения, постарайтесь ими не пренебрегать, окупится;-). Чертежи делать не нужно. Решения и ответы в конце урока.
Что важно при решении задач аналитической геометрии? Важно быть ПРЕДЕЛЬНО ВНИМАТЕЛЬНЫМ, чтобы не допустить мастерскую ошибку «два плюс два равно нулю». Сразу извиняюсь, если где ошибся =)
Как найти длину отрезка?
Длина, как уже отмечалось, обозначается знаком модуля.
Если даны две точки плоскости и , то длину отрезка можно вычислить по формуле
Если даны две точки пространства и , то длину отрезка можно вычислить по формуле
Примечание: Формулы останутся корректными, если переставить местами соответствующие координаты: и , но более стандартен первый вариант
Пример 3
Решение:
по соответствующей формуле:
Ответ:
![]()
Для наглядности выполню чертёж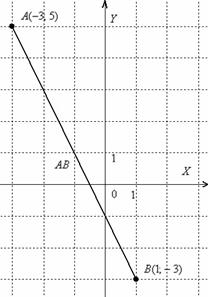
Отрезок – это не вектор , и перемещать его куда-либо, конечно, нельзя. Кроме того, если вы выполните чертеж в масштабе: 1 ед. = 1 см (две тетрадные клетки), то полученный ответ можно проверить обычной линейкой, непосредственно измерив длину отрезка.
Да, решение короткое, но в нём есть ещё пара важных моментов, которые хотелось бы пояснить:
Во-первых, в ответе ставим размерность: «единицы». В условии не сказано, ЧТО это, миллиметры, сантиметры, метры или километры. Поэтому математически грамотным решением будет общая формулировка: «единицы» – сокращенно «ед.».
Во-вторых, повторим школьный материал, который полезен не только для рассмотренной задачи:
Обратите внимание на важный технический приём
– вынесение множителя из-под корня
. В результате вычислений у нас получился результат и хороший математический стиль предполагает вынесение множителя из-под корня (если это возможно). Подробнее процесс выглядит так: ![]() . Конечно, оставить ответ в виде не будет ошибкой – но недочетом-то уж точно и весомым аргументом для придирки со стороны преподавателя.
. Конечно, оставить ответ в виде не будет ошибкой – но недочетом-то уж точно и весомым аргументом для придирки со стороны преподавателя.
Вот другие распространенные случаи:
Нередко под корнем получается достаточно большое число, например . Как быть в таких случаях? На калькуляторе проверяем, делится ли число на 4: . Да, разделилось нацело, таким образом: ![]() . А может быть, число ещё раз удастся разделить на 4? . Таким образом:
. А может быть, число ещё раз удастся разделить на 4? . Таким образом: ![]() . У числа последняя цифра нечетная, поэтому разделить в третий раз на 4 явно не удастся. Пробуем поделить на девять: . В результате:
. У числа последняя цифра нечетная, поэтому разделить в третий раз на 4 явно не удастся. Пробуем поделить на девять: . В результате:
Готово.
Вывод: если под корнем получается неизвлекаемое нацело число, то пытаемся вынести множитель из-под корня – на калькуляторе проверяем, делится ли число на: 4, 9, 16, 25, 36, 49 и т.д.
В ходе решения различных задач корни встречаются часто, всегда пытайтесь извлекать множители из-под корня во избежание более низкой оценки да ненужных заморочек с доработкой ваших решений по замечанию преподавателя.
Давайте заодно повторим возведение корней в квадрат и другие степени:
Правила действий со степенями в общем виде можно найти в школьном учебнике по алгебре, но, думаю, из приведённых примеров всё или почти всё уже ясно.
Задание для самостоятельного решения с отрезком в пространстве:
Пример 4
Даны точки и . Найти длину отрезка .
Решение и ответ в конце урока.
Как найти длину вектора?
Если дан вектор плоскости , то его длина вычисляется по формуле .
Если дан вектор пространства , то его длина вычисляется по формуле ![]() .
.
Будут и задачи для самостоятельного решения, к которым можно посмотреть ответы.
Понятие вектора
Прежде чем Вы узнаете всё о векторах и операциях над ними, настройтесь на решение несложной задачи. Есть вектор Вашей предприимчивости и вектор Ваших инновационных способностей. Вектор предприимчивости ведёт Вас к Цели 1, а вектор инновационных способностей - к Цели 2. Правила игры таковы, что Вы не можете двигаться сразу по направлениям двух этих векторов и достигнуть сразу двух целей. Векторы взаимодействуют, или, если говорить математическим языком, над векторами производится некоторая операция. Результатом этой операции становится вектор "Результат", который приводит Вас к Цели 3.
А теперь скажите: результатом какой операции над векторами "Предприимчивость" и "Инновационные способности" является вектор "Результат"? Если не можете сказать сразу, не унывайте. По мере изучения этого урока Вы сможете ответить на этот вопрос.
Как мы уже увидели выше, вектор обязательно идёт от некоторой точки A по прямой к некоторой точке B . Следовательно, каждый вектор имеет не только числовое значение - длину, но также физическое и геометрическое - направленность. Из этого выводится первое, самое простое определение вектора. Итак, вектор - это направленный отрезок, идущий от точки A к точке B . Обозначается он так: .

А чтобы приступить к различным операциям с векторами , нам нужно познакомиться с ещё одним определением вектора.
Вектор - это вид представления точки, до которой требуется добраться из некоторой начальной точки. Например, трёхмерный вектор, как правило, записывается в виде (х, y, z ) . Говоря совсем просто, эти числа означают, как далеко требуется пройти в трёх различных направлениях, чтобы добраться до точки.
Пусть дан вектор. При этом x = 3 (правая рука указывает направо), y = 1 (левая рука указывает вперёд), z = 5 (под точкой стоит лестница, ведущая вверх). По этим данным вы найдёте точку, проходя 3 метра в направлении, указываемом правой рукой, затем 1 метр в направлении, указываемом левой рукой, а далее Вас ждёт лестница и, поднимаясь на 5 метров, Вы, наконец, окажетесь в конечной точке.
Все остальные термины - это уточнения представленного выше объяснения, необходимые для различных операций над векторами, то есть, решения практических задач. Пройдёмся по этим более строгим определениям, останавливаясь на типичных задачах на векторы.
Физическими примерами векторных величин могут служить смещение материальной точки, двигающейся в пространстве, скорость и ускорение этой точки, а также действующая на неё сила.

Геометрический вектор представлен в двумерном и трёхмерном пространстве в виде направленного отрезка . Это отрезок, у которого различают начало и конец.
Если A - начало вектора, а B - его конец, то вектор обозначается символом или одной строчной буквой . На рисунке конец вектора указывается стрелкой (рис. 1)
Длиной (или модулем ) геометрического вектора называется длина порождающего его отрезка
Два вектора называются равными , если они могут быть совмещены (при совпадении направлений) путём параллельного переноса, т.е. если они параллельны, направлены в одну и ту же сторону и имеют равные длины.
В физике часто рассматриваются закреплённые векторы , заданные точкой приложения, длиной и направлением. Если точка приложения вектора не имеет значения, то его можно переносить, сохраняя длину и направление в любую точку пространства. В этом случае вектор называется свободным . Мы договоримся рассматривать только свободные векторы .
Линейные операции над геометрическими векторами
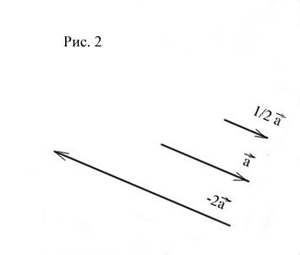
Умножение вектора на число
Произведением вектора на число называется вектор, получающийся из вектора растяжением (при ) или сжатием (при ) в раз, причём направление вектора сохраняется, если , и меняется на противоположное, если . (Рис. 2)
Из определения следует, что векторы и = всегда расположены на одной или на параллельных прямых. Такие векторы называются коллинеарными . (Можно говорить также, что эти векторы параллельны, однако в векторной алгебре принято говорить "коллинеарны".) Справедливо и обратное утверждение: если векторы и коллинеарны, то они связаны отношением
Следовательно, равенство (1) выражает условие коллинеарности двух векторов.

Сложение и вычитание векторов
При сложении векторов нужно знать, что суммой векторов и называется вектор , начало которого совпадает с началом вектора , а конец - с концом вектора , при условии, что начало вектора приложено к концу вектора . (Рис. 3)

Это определение может быть распределено на любое конечное число векторов. Пусть в пространстве даны n
свободных векторов . При сложении
нескольких векторов за их сумму принимают замыкающий вектор, начало которого
совпадает с началом первого вектора, а конец - с концом последнего вектора. То есть, если к концу вектора
приложить начало вектора , а к концу вектора
- начало вектора и т.д. и, наконец, к концу вектора
- начало вектора , то
суммой этих векторов служит замыкающий вектор ![]() , начало которого совпадает с началом первого вектора
, а конец - с концом последнего вектора . (Рис. 4)
, начало которого совпадает с началом первого вектора
, а конец - с концом последнего вектора . (Рис. 4)
Слагаемые называются составляющими вектора , а сформулированное правило - правилом многоугольника . Этот многоугольник может и не быть плоским.
При умножении вектора на число -1 получается противоположный вектор . Векторы и имеют одинаковые длины и противоположные направления. Их сумма даёт нулевой вектор , длина которого равна нулю. Направление нулевого вектора не определено.
В векторной алгебре нет необходимости рассматривать отдельно операцию вычитания: вычесть из вектора
вектор
означает прибавить к вектору противоположный вектор
, т.е. ![]()
Пример 1. Упростить выражение:
![]() .
.
 ,
,
то есть, векторы можно складывать и умножать на числа так же, как и многочлены (в частности, также задачи на упрощение выражений). Обычно необходимость упрощать линейно подобные выражения с векторами возникает перед вычислением произведений векторов.
Пример 2. Векторы и служат диагоналями параллелограмма ABCD (рис. 4а). Выразить через и векторы , , и , являющиеся сторонами этого параллелограмма.

Решение. Точка пересечения диагоналей параллелограмма делит каждую диагональ пополам. Длины требуемых в условии задачи векторов находим либо как половины сумм векторов, образующих с искомыми треугольник, либо как половины разностей (в зависимости от направления вектора, служащего диагональю), либо, как в последнем случае, половины суммы, взятой со знаком минус. Результат - требуемые в условии задачи векторы:

Есть все основания полагать, что теперь Вы правильно ответили на вопрос о векторах "Предприимчивость" и "Инновационные способности" в начале этого урока. Правильный ответ: над этими векторами производится операция сложения.
Решить задачи на векторы самостоятельно, а затем посмотреть решения
Как найти длину суммы векторов?
Эта задача занимает особое место в операциях с векторами, так как предполагает использование тригонометрических свойств. Допустим, Вам попалась задача вроде следующей:
Даны длины векторов ![]() и длина суммы этих векторов .
Найти длину разности этих векторов .
и длина суммы этих векторов .
Найти длину разности этих векторов .
Решения этой и других подобных задач и объяснения, как их решать - в уроке "Сложение векторов: длина суммы векторов и теорема косинусов ".
А проверить решение таких задач можно на Калькуляторе онлайн "Неизвестная сторона треугольника (сложение векторов и теорема косинусов)" .
А где произведения векторов?
Произведения вектора на вектор не являются линейными операциями и рассматриваются отдельно. И у нас есть уроки "Скалярное произведение векторов " и "Векторное и смешанное произведения векторов ".
Проекция вектора на ось
Проекция вектора на ось равна произведению длины проектируемого вектора на косинус угла между вектором и осью:
![]()
Как известно, проекцией точки A на прямую (плоскость) служит основание перпендикуляра , опущенного из этой точки на прямую (плоскость).

Пусть - произвольный вектор (Рис. 5), а и - проекции его начала (точки A ) и конца (точки B ) на ось l . (Для построения проекции точки A ) на прямую проводим через точку A плоскость, перпендикулярную прямой. Пересечение прямой и плоскости определит требуемую проекцию.
Составляющей вектора на оси l называется такой вектор , лежащий на этой оси, начало которого совпадает с проекцией начала, а конец - с проекцией конца вектора .
Проекцией вектора на ось l называется число
![]() ,
,
равное длине составляющего вектора на этой оси, взятое со знаком плюс, если направление составляюшей совпадает с направлением оси l , и со знаком минус, если эти направления противоположны.
Основные свойства проекций вектора на ось:
1. Проекции равных векторов на одну и ту же ось равны между собой.
2. При умножении вектора на число его проекция умножается на это же число.
3. Проекция суммы векторов на какую-либо ось равна сумме проекций на эту же ось слагаемых векторов.
4. Проекция вектора на ось равна произведению длины проектируемого вектора на косинус угла между вектором и осью:
![]()
 .
.

Решение. Спроектируем векторы на ось l как определено в теоретической справке выше. Из рис.5а очевидно, что проекция суммы векторов равна сумме проекций векторов. Вычисляем эти проекции:

Находим окончательную проекцию суммы векторов:
Связь вектора с прямоугольной декартовой системой координат в пространстве
Знакомство с прямоугольной декартовой системой координат в пространстве состоялось в соответствующем уроке , желательно открыть его в новом окне.
В упорядоченной системе координатных осей 0xyz ось Ox называется осью абсцисс , ось 0y – осью ординат , и ось 0z – осью аппликат .

С произвольной точкой М пространства свяжем вектор
называемый радиус-вектором точки М и спроецируем его на каждую из координатных осей. Обозначим величины соответствующих проекций:
Числа x, y, z называются координатами точки М , соответственно абсциссой , ординатой и аппликатой , и записываются в виде упорядоченной точки чисел: M (x; y; z) (рис.6).
Вектор единичной длины, направление которого совпадает с направлением оси, называют единичным вектором (или ортом ) оси. Обозначим через
Соответственно орты координатных осей Ox , Oy , Oz
![]()
Теорема. Всякий вектор может быть разложен по ортам координатных осей:

![]() (2)
(2)
Равенство (2) называется разложением вектора по координатным осям. Коэффициентами этого разложения являются проекции вектора на координатные оси. Таким образом, коэффициентами разложения (2) вектора по координатным осям являются координаты вектора.
После выбора в пространстве определённой системы координат вектор и тройка его координат однозначно определяют друг друга, поэтому вектор может быть записан в форме
Представления вектора в виде (2) и (3) тождественны.
Условие коллинеарности векторов в координатах
Как мы уже отмечали, векторы называются коллинеарными, если они связаны отношением
Пусть даны векторы ![]() .
Эти векторы коллинеарны, если координаты векторов связаны отношением
.
Эти векторы коллинеарны, если координаты векторов связаны отношением
![]() ,
,
то есть, координаты векторов пропорциональны.
Пример 6.
Даны векторы ![]() .
Коллинеарны ли эти векторы?
.
Коллинеарны ли эти векторы?
Решение. Выясним соотношение координат данных векторов:
![]() .
.
Координаты векторов пропорциональны, следовательно, векторы коллинеарны, или, что то же самое, параллельны.
Длина вектора и направляющие косинусы
Вследствие взаимной перпендикулярности координатных осей длина вектора
![]()
равна длине диагонали прямоугольного параллелепипеда, построенного на векторах
и выражается равенством
![]() (4)
(4)
Вектор полностью определяется заданием двух точек (начала и конца), поэтому координаты вектора можно выразить через координаты этих точек.
Пусть в заданной системе координат начало вектора находится в точке
а конец – в точке


Из равенства
Следует, что
или в координатной форме
Следовательно, координаты вектора равны разностям одноимённых координат конца и начала вектора . Формула (4) в этом случае примет вид
Направление вектора определяют направляющие косинусы . Это косинусы углов, которые вектор образует с осями Ox , Oy и Oz . Обозначим эти углы соответственно α , β и γ . Тогда косинусы этих углов можно найти по формулам
Направляющие косинусы вектора являются также координатами орта этого вектора и, таким образом, орт вектора

![]() .
.
Учитывая, что длина орта вектора равна одной единице, то есть
![]() ,
,
получаем следующее равенство для направляющих косинусов:
Пример 7. Найти длину вектора x = (3; 0; 4).
Решение. Длина вектора равна
![]()
Пример 8. Даны точки:
Выяснить, равнобедренный ли треугольник, построенный на этих точках.
Решение. По формуле длины вектора (6) найдём длины сторон и установим, есть ли среди них две равные:

Две равные стороны нашлись, следовательно необходимость искать длину третьей стороны отпадает, а заданный треугольник является равнобедренным.
Пример 9.
Найти длину вектора
и его направляющие косинусы, если ![]() .
.
Решение. Координаты вектора даны:
![]() .
.
Длина вектора равна квадратному корню из суммы квадратов координат вектора:
![]() .
.
Находим направляющие косинусы:

Решить задачу на векторы самостоятельно, а затем посмотреть решение
Операции над векторами, заданными в координатной форме
Пусть даны два вектора и , заданные своими проекциями:
![]()
![]()
Укажем действия над этими векторами.
Вектором в геометрии называют направленный отрезок или упорядоченную пару точек евклидова пространства.Ортом вектора является единичный вектор нормированного векторного пространства или вектор, норма (длина) которого равна единице.
Вам понадобится
- Знания по геометрии.
Инструкция
Для начала необходимо вычислить длину вектора . Как известно, длина (модуль) вектора равна корню квадратному из суммы квадратов координат. Пусть дан вектор с координатами: a(3, 4). Тогда его длина равна |a| = (9 + 16)^1/2 или |a|=5.
Чтобы найти орт вектора a, необходимо поделить каждую его на его длину. Результатом будет вектор, который называется ортом или единичным вектором. Для вектора а(3, 4) ортом будет являться вектор а(3/5, 4/5). Вектор a` будет являться единичным для вектора а.
Для проверки, правильно ли найден орт, можно проделать следующее: найти длину полученного орта, если она равна единице, то все найдено верно, если нет, то в расчеты закралась ошибка. Проверим правильно ли найден орт a`. Длина вектора a` равна: a` = (9/25 + 16/25)^1/2 = (25/25)^1/2 = 1. Итак, длина вектора a` равна единице, значит орт найден верно.
Изменение координаты x2 — x1 принято обозначать символом Δx12 (читается «дельта икс один, два»). Эта запись означает, что за промежуток времени от момента t1 до момента t2 изменение координаты тела Δx12 = x2 — x1. Таким образом, если тело двигалось в положительном направлении оси X выбранной системы координат (x2 > x1), то Δx12 >
На рис. 45 изображено точечное тело В, которое движется в отрицательном направлении оси X. За промежуток времени от t1 до t2 оно перемещается из точки с большей координатой x1 в точку с меньшей координатой x2. В результате изменение координаты точки B за рассматриваемый промежуток времени Δx12 = x2 — x1 = (2 — 5) м = -3 м. Вектор перемещения в этом случае будет направлен в отрицательном направлении оси X, а его модуль |Δx12| равен 3 м. Из рассмотренных примеров можно сделать следующие выводы.
В рассмотренных примерах (см. рис. 44 и 45) тело все время двигалось в каком-либо одном направлении.
Как найти модуль перемещения в физике?(может есть какая-нибудь универсальная формула?)
Поэтому пройденный им путь равен модулю изменения координаты тела и модулю перемещения: s12 = |Δx12|.
Определим изменение координаты и перемещение тела за промежуток времени от t0 = 0 до t2 = 7 с. В соответствии с определением изменение координаты Δx02 = x2 — x0 = 2 м >
Теперь определим путь, который прошло тело за тот же промежуток времени от t0 = 0 до t2 = 7 с. Сначала тело прошло 8 м в одном направлении (что соответствует модулю изменения координаты Δx01), а затем 6 м в обратном направлении (эта величина соответствует модулю изменения координаты Δx12). Значит, всего тело прошло 8 + 6 = 14 (м). По определению пути за промежуток времени от t0 до t2 тело прошло путь s02 = 14 м.
Итоги
Перемещением точки за промежуток времени называют направленный отрезок прямой, начало которого совпадает с начальным положением точки, а конец – с конечным положением точки.
Вопросы
Упражнения
Векторы, действия с векторами
теоремы Пифагора теореме косинусов
Длину вектора будем обозначать . Аналогичное обозначение имеет модуль числа, и длину вектора часто называют модулем вектора.

![]() , откуда
, откуда ![]()
 .
.
Таким образом,  .
.
![]()
Рассмотрим пример.
:
![]()

![]()
 .
.
Таким образом, длина вектора ![]()
 .
.
Вычислите длину вектора ![]()
![]() , следовательно,
, следовательно, ![]()
К началу страницы
![]()

![]()
Рассмотрим решения примеров.
![]() .
.
Перемещение
:
:
 .
.
![]() .
.


К началу страницы

Таким образом, .
или , или ,
Некогда разбираться?
Закажите решение
К началу страницы
До сих пор мы рассматривали только прямолинейное равномерное движение. При этом точечные тела двигались в выбранной системе отсчета либо в положительном, либо в отрицательном направлении оси координат X. Мы установили, что в зависимости от направления движения тела, например, за промежуток времени от момента t1 до момента t2 изменение координаты тела (x2 — x1) может быть положительным, отрицательным или равным нулю (если x2 = x1).
Изменение координаты x2 — x1 принято обозначать символом Δx12 (читается «дельта икс один, два»). Эта запись означает, что за промежуток времени от момента t1 до момента t2 изменение координаты тела Δx12 = x2 — x1. Таким образом, если тело двигалось в положительном направлении оси X выбранной системы координат (x2 > x1), то Δx12 > 0. Если же движение происходило в отрицательном направлении оси X (x21), то Δx12
Результат движения удобно определять с помощью векторной величины. Такой векторной величиной является перемещение.
Перемещением точки за промежуток времени называют направленный отрезок прямой, начало которого совпадает с начальным положением точки, а конец – с конечным положением точки.
Как и любую векторную величину, перемещение характеризуют модулем и направлением.
Записывать вектор перемещения точки за промежуток времени от t1 до t2 мы будем следующим способом: Δx12.
Поясним сказанное на примере. Пусть некоторая точка A (точечное чело) движется в положительном направлении оси X и за промежуток времени от t1 до t2 перемещается из точки с координатой x1 в точку с большей координатой x2 (рис. 44). В этом случае вектор перемещения направлен в положительном направлении оси X, а его модуль равен изменению координаты за рассматриваемый промежуток времени: Δx12 = x2 — x1 = (5 — 2) м = 3 м.
На рис. 45 изображено точечное тело В, которое движется в отрицательном направлении оси X.
За промежуток времени от t1 до t2 оно перемещается из точки с большей координатой x1 в точку с меньшей координатой x2. В результате изменение координаты точки B за рассматриваемый промежуток времени Δx12 = x2 — x1 = (2 — 5) м = -3 м. Вектор перемещения в этом случае будет направлен в отрицательном направлении оси X, а его модуль |Δx12| равен 3 м. Из рассмотренных примеров можно сделать следующие выводы.
Направление перемещения при прямолинейном движении в одном направлении совпадает с направлением движения.
Модуль вектора перемещения равен модулю изменения координаты тела за рассматриваемый промежуток времени.
В повседневной жизни для описания конечного результата движения используют понятие «путь». Обычно путь обозначают символом S.
Путь – это все расстояние, пройденное точечным телом за рассматриваемый промежуток времени.
Как и любое расстояние, путь – величина неотрицательная. Например, путь, пройденный точкой A в рассмотренном примере (см. рис. 44), равен трем метрам. Путь, пройденный точкой B, также равен трем метрам.
В рассмотренных примерах (см. рис. 44 и 45) тело все время двигалось в каком-либо одном направлении. Поэтому пройденный им путь равен модулю изменения координаты тела и модулю перемещения: s12 = |Δx12|.
Если тело двигалось все время в одном направлении, то пройденный им путь равен модулю перемещения и модулю изменения координаты.
Ситуация изменится, если тело в течение рассматриваемого промежутка времени изменяет направление движения.
На рис. 46 изображено, как двигалось точечное тело с момента t0 = 0 до момента t2 = 7 с. До момента t1 = 4 с движение происходило равномерно в положительном направлении оси X. В результате чего изменение координаты Δx01 = x1 — x0 = (11 — 3) м = -8 м. После этого тело стало двигаться в отрицательном направлении оси X до момента t2 = 7 с. При этом изменение его координаты Δx12 = x2 — x1 = (5 — 11) м = -6 м. График этого движения приведен на рис. 47.
Определим изменение координаты и перемещение тела за промежуток времени от t0 = 0 до t2 = 7 с. В соответствии с определением изменение координаты Δx02 = x2 — x0 = 2 м > 0. Поэтому перемещение Δx02 направлено в положительном направлении оси Х, а его модуль равен 2 м.
Теперь определим путь, который прошло тело за тот же промежуток времени от t0 = 0 до t2 = 7 с. Сначала тело прошло 8 м в одном направлении (что соответствует модулю изменения координаты Δx01), а затем 6 м в обратном направлении (эта величина соответствует модулю изменения координаты Δx12).
Траектория
Значит, всего тело прошло 8 + 6 = 14 (м). По определению пути за промежуток времени от t0 до t2 тело прошло путь s02 = 14 м.
Разобранный пример позволяет сделать вывод:
В случае, когда тело в течение рассматриваемого промежутка времени меняет направление своего движения, путь (все пройденное телом расстояние) больше и модуля перемещения тела, и модуля изменения координаты тела.
Теперь представьте себе, что тело после момента времени t2 = 7 с продолжило свое движение в отрицательном направлении оси X до момента t3 = 8 с в соответствии с законом, изображенным на рис. 47 пунктирной линией. В результате в момент времени t3 = 8 с координата тела стала равна x3 = 3 м. Нетрудно определить, что в этом случае перемещение тела за промежуток времени от t0 до t3 с равно Δx13 = 0.
Ясно, что если нам известно только перемещение тела за время его движения, то мы не можем сказать как двигалось тело в течение этого времени. Например, если бы о теле было известно только, что его начальная и конечная координаты равны, то мы сказали бы, что за время движения перемещение этого тела равно нулю. Сказать что-либо более конкретное о характере движения этого тела было бы нельзя. Тело могло при таких условиях вообще стоять на месте в течение всего промежутка времени.
Перемещение тела за некоторый промежуток времени зависит только от начальной и конечной координат тела и не зависит от того, как двигалось тело в течение этого промежутка времени.
Итоги
Перемещением точки за промежуток времени называют направленный отрезок прямой, начало которого совпадает с начальным положением точки, а конец – с конечным положением точки.
Перемещение точечного тела определяется только конечной и начальной координатами тела и не зависит от того, как двигалось тело в течение рассматриваемого промежутка времени.
Путь – все расстояние, пройденное точечным телом за рассматриваемый промежуток времени.
Если тело в процессе движения не меняло направления движения, то пройденный этим телом путь равен модулю его перемещения.
Если тело в течение рассматриваемого промежутка времени меняло направление своего движения, путь больше и молуля перемещения тела, и модуля изменения координаты тела.
Путь всегда величина неотрицательная. Он равен нулю только в том случае, если в течение всего рассматриваемого промежутка времени тело покоилось (стояло на месте).
Вопросы
- Что такое перемещение? От чего оно зависит?
- Что такое путь? От чего он зависит?
- Чем путь отличается от перемещения и изменения координаты за один и тот же промежуток времени, в течение которого тело двигалось прямолинейно, не изменяя направления движения?
Упражнения
- Используя закон движения в графической форме, представленный на рис. 47, опишите характер движения тела (направление, скорость) в разные промежутки времени: от t0 до t1, от t1 до t2, от t2 до t3.
- Собачка Протон выбежала из дома в момент времени t0 = 0, а затем по команде своего хозяина в момент времени t4 = 4 с бросилась обратно. Зная, что Протон все время бежал по прямой и модуль его скорости |v| = 4 м/с, определите графическим способом: а) изменение координаты и путь Протона за промежуток времени от t0 = 0 до t6 = 6 с; б) путь Протона за промежуток времени от t2 = 2 с до t5 = 5 с.
Векторы, действия с векторами
Нахождение длины вектора, примеры и решения.
По определению вектор – это направленный отрезок, а длина этого отрезка в заданном масштабе является длиной вектора. Таким образом, задача нахождения длины вектора на плоскости и в пространстве сводится к нахождению длины соответствующего отрезка. Для решения этой задачи в нашем распоряжении все средства геометрии, хотя в большинстве случаев достаточно теоремы Пифагора . С ее помощью можно получить формулу для вычисления длины вектора по его координатам в прямоугольной системе координат, а также формулу нахождения длины вектора по координатам точек его начала и конца. Когда вектор является стороной треугольника, то его длина может быть найдена по теореме косинусов , если известны длины двух других сторон и угол между ними.
Нахождение длины вектора по координатам.
Длину вектора будем обозначать .
физический словарик (кинематика)
Аналогичное обозначение имеет модуль числа, и длину вектора часто называют модулем вектора.
Начнем с нахождения длины вектора на плоскости по координатам.
Введем на плоскости прямоугольную декартову систему координатOxy. Пусть в ней задан вектор и он имеет координаты . Получим формулу, позволяющую находить длину вектора через координаты и .
Отложим от начала координат (от точки О) вектор . Обозначим проекции точки А на координатные оси как и соответственно и рассмотрим прямоугольник с диагональю ОА.
В силу теоремы Пифагора справедливо равенство ![]() , откуда
, откуда ![]() . Из определения координат вектора в прямоугольной системе координат мы можем утверждать, что и , а по построению длина ОА равна длине вектора , следовательно, .
. Из определения координат вектора в прямоугольной системе координат мы можем утверждать, что и , а по построению длина ОА равна длине вектора , следовательно, .
Таким образом, формула для нахождения длины вектора
по его координатам на плоскости имеет вид .
Если вектор представлен в виде разложения по координатным векторам ![]() , то его длина вычисляется по этой же формуле , так как в этом случае коэффициенты и являются координатами вектора в заданной системе координат.
, то его длина вычисляется по этой же формуле , так как в этом случае коэффициенты и являются координатами вектора в заданной системе координат.
Рассмотрим пример.
Найдите длину вектора , заданного в декартовой системе координат.
Сразу применяем формулу для нахождения длины вектора по координатам :
Теперь получим формулу для нахождения длины вектора ![]() по его координатам в прямоугольной системе координат Oxyz в пространстве.
по его координатам в прямоугольной системе координат Oxyz в пространстве.
Отложим от начала координат вектор и обозначим проекции точки А на координатные оси как и . Тогда мы можем построить на сторонах и прямоугольный параллелепипед, в котором ОА будет диагональю.
В этом случае (так как ОА – диагональ прямоугольного параллелепипеда), откуда ![]() . Определение координат вектора позволяет нам записать равенства , а длина ОА равна искомой длине вектора, следовательно, .
. Определение координат вектора позволяет нам записать равенства , а длина ОА равна искомой длине вектора, следовательно, .
Таким образом, длина вектора ![]() в пространстве равна корню квадратному из суммы квадратов его координат
, то есть, находится по формуле .
в пространстве равна корню квадратному из суммы квадратов его координат
, то есть, находится по формуле .
Вычислите длину вектора ![]() , где — орты прямоугольной системы координат.
, где — орты прямоугольной системы координат.
Нам дано разложение вектора по координатным векторам вида ![]() , следовательно,
, следовательно, ![]() . Тогда по формуле нахождения длины вектора по координатам имеем .
. Тогда по формуле нахождения длины вектора по координатам имеем .
К началу страницы
Длина вектора через координаты точек его начала и конца.
А как найти длину вектора, если даны координаты точек его начала и конца?
В предыдущем пункте мы получили формулы для нахождения длины вектора по его координатам на плоскости и в трехмерном пространстве. Тогда мы можем ими воспользоваться, если найдем координаты вектора по координатам точек его начала и конца.
Таким образом, если на плоскости заданы точки и , то вектор имеет координаты ![]() и его длина вычисляется по формуле , а формула для нахождения длины вектора по координатам точек
и его длина вычисляется по формуле , а формула для нахождения длины вектора по координатам точек ![]() и трехмерного пространства имеет вид .
и трехмерного пространства имеет вид .
Рассмотрим решения примеров.
Найдите длину вектора , если в прямоугольной декартовой системе координат ![]() .
.
Можно сразу применить формулу для нахождения длины вектора по координатам точек начала и конца на плоскости :
Вторым вариантом решения является определение координат вектора через координаты точек и применение формулы :
.
Определите, при каких значениях длина вектора равна , если ![]() .
.
Длина вектора по координатам точек начала и конца может быть найдена как
Приравняв полученное значение длины вектора к , вычислим искомые :
К началу страницы
Нахождение длины вектора по теореме косинусов.
Большинство задач на нахождение длины вектора решаются в координатах. Однако, когда координаты вектора не известны приходится искать другие пути решения.
Пусть известны длины двух векторов , и угол между ними (или косинус угла), а требуется найти длину вектора или . В этом случае можно по теореме косинусов в треугольнике АВС вычислить длину стороны ВС, которая равна искомой длине вектора.
Разберем решение примера для пояснения сказанного.
Длины векторов и равны 3 и 7 соответственно, а угол между ними равен . Вычислите длину вектора .
Длина вектора равна длине стороны ВС в треугольнике АВС. Из условия нам известны длины сторон АВ и АС этого треугольника (они равны длинам соответствующих векторов), а также угол между ними, поэтому нам достаточно данных для применения теоремы косинусов:
Таким образом, .
Итак, для нахождения длины вектора по координатам используем формулы или ,
по координатам точек начала и конца вектора — или ,
в некоторых случаях к результату приводит теорема косинусов.
Некогда разбираться?
Закажите решение
К началу страницы
- Бугров Я.С., Никольский С.М. Высшая математика. Том первый: элементы линейной алгебры и аналитической геометрии.
- Атанасян Л.С., Бутузов В.Ф., Кадомцев С.Б., Позняк Э.Г., Юдина И.И. Геометрия. 7 – 9 классы: учебник для общеобразовательных учреждений.
- Атанасян Л.С., Бутузов В.Ф., Кадомцев С.Б., Киселева Л.С., Позняк Э.Г. Геометрия. Учебник для 10-11 классов средней школы.
Поиск Лекций
Скалярный квадрат вектора
Что будет, если вектор умножить на самого себя?
Число называется скалярным квадратом вектора , и обозначатся как .
Таким образом,скалярный квадрат вектора
равен квадрату длины данного вектора:
 Солнечная система Планеты - гиганты
Солнечная система Планеты - гиганты Урок «Квадратный трехчлен и его корни
Урок «Квадратный трехчлен и его корни Древнее царство (Древний Египет)
Древнее царство (Древний Египет)